Asztrofotózás a gyakorlatban
Ebben a könyvben az asztrofotózás gyakorlatával foglalkozó cikkeket találsz.
- Bach Zoltán: APT oktató sorozat 1. rész
- Bach Zoltán: Képfeldolgozási alapok
- Bajmóczy György: Szolárgráf készítése, a Napívek megörökítése
- Jelinek Gábor: Rendkívül hatékony csillagkicsinyítés Adobe Photoshop-ban
- Kiss Péter - Milyen expozíciós idővel készült flat képeknek a legjobb a korrekciós hatása a kalibrált majd integrált nyers képekre?
- Lázár József: Bevezetés a PixInsight használatába
- Tóth Bence: Miért nem pontszerűek a csillagaim a sarkokban is?
- Tóth Gábor: Asztrofotózás, ahogy én csinálom - Tervezés és előkészületek
- Tóth Gábor: Asztrofotózás, ahogy én csinálom - A távcső összeszerelése
- Schmall Rafael : Az éjszakai tájképek világa I.
Bach Zoltán: APT oktató sorozat 1. rész
Bach Zoltán: Képfeldolgozási alapok
Bajmóczy György: Szolárgráf készítése, a Napívek megörökítése
Szolárgráf
A camera obscura („sötétkamra”) jelenséget valószínűleg Kínában a Kr. e. IV. században fedezték fel. A lyukkamera elvén működő asztronómiai megfigyelésekről már Arisztotelész is említést tesz. A jelenség első jelentős említése Ibn al-Hajszam arab természettudósnál található meg, aki a Nap- és Holdfogyatkozással kapcsolatban említette a camera obscurában fordítottan megjelenő képet 1038-ban.

A lyukkamera működése
A lyukon át a dobozban egy fejjel lefelé, oldalfordított kép rajzolódik ki, amit rögzítünk a fényérzékeny papíron. A Nap mozgásának rögzítésére kifejlesztett lyukkamerát nevezzük szolárgráfnak.
A szolárgráf henger alakú, a henger belső felében helyezkedik el ívesen a fotópapír. Ez a henger lehet konzervdoboz, üres filmes doboz, vagy bármi, ami nem korrodál, és ereszti be a vizet és fényt. Az expozíciós idő egy naptól fél évig terjedhet. Fontos tudni, hogy nem szükséges a hagyományos vegyi előhívás és fixálás! A hosszú expozíció miatt egy jól látható színes negatív kép jelenik meg a fekete-fehér fotópapíron. Ezt a képet szkenneljük be és utána képszerkesztő programmal végezzük el a szükséges módosításokat.
Ez a technika egy különleges szegmense az asztrofotózásnak, itt még a régi ezüst-nitrát emulzió játssza a főszerepet. A kamerát is magunk készítjük, szinte végtelen variációt kipróbálhatunk a kamera készítése és a kompozíció beállítása során. A szolárgráf rendkívül egyszerű szerkezet, de mégis sok dologra kell figyelmet fordítani, hogy a hosszú expozíció után szép képet kapjunk.

Röviden pár fontos dolog, amire érdemes figyelni
- Matt fotópapírt kell használni, hogy csökkentsük a kamerán belüli tükröződéseket.
- A papírt rögzíteni kell a kamerában, mert a hosszú expóidő alatt elmozdul.
- Fontos a megfelelő lyukméret ( 0,3-0,5mm).
- Biztosítani kell, hogy a kamera ne ázzon be.
- Kihelyezéskor gondoskodni kell a megfelelő, tartósan fix rögzítésről.
Miért érdemes komolyabban foglalkozni ezzel a technikával?
Saját készítésű kamerával tudunk különleges képeket készíteni. Rögzíteni tudjuk a Nap útját napfordulótól fél éven át, így a Nap gyönyörű íveket rajzol a papírra. Próbálkozhatunk különleges kompozíciókkal, épületek, hidak, tükröződő üvegfelületek érdekes leképezését kapjuk az ívelt fotópapíron. Nem várt kalandokba keveredhetünk a kamera kihelyezésekor, és ha sikeresen rögzítettük egy frekventált helyen izgulhatunk, hogy pár hónap múlva sértetlenül megtaláljuk.
Bajmóczy György

Jelinek Gábor: Rendkívül hatékony csillagkicsinyítés Adobe Photoshop-ban
Miért van szükség a képfeldolgozás során csillagkicsinyítésre?
Asztrofotózásnál rendszeresen szembesülhetünk azzal a problémával, hogy a sűrű csillagmező, illetve a képek feldolgozása során a csillagok jelentősen megnövekedett mérete elnyomja, háttérbe szorítja a fotózott témát, melyet többek között csillagkicsinyítéssel kompenzálhatunk.
Alább láthatunk arra példát, hogy a cikkben részletezett módszerrel történő csillagmező redukció mennyivel javíthatja a csillag-ködösség arányt a ködösségek javára ugyanazon a felvételen. Az összhatásban a különbség szignifikáns lehet, sokkal halványabb ködrészletek is érvényesülhetnek:

Miért Photoshop?
A csillagkicsinyítés természetesen sokféle programmal, sokféleképpen elvégezhető. Tapasztalataink szerint azonban mindmáig ez az egyik legelterjedtebb program az asztrofotósok körében.
Milyen szempontokat vettünk figyelembe a csillagkicsinyítés során?
Az alábbiakban pár lépésben összeszedtük azt az eljárást, mellyel a csillagkicsinyítés viszonylag kedvező eredménnyel elvégezhető.
A rendszeresen felmerülő problémáknál az alábbiakra koncentráltunk:
- az eljárás során a ködösségek kivételével a lehető legtöbb csillagra hatással legyen a kijelölés,
- a csillagok körül komolyabb, zavaró „blokkosodás”, valamint peremsötétedés ne alakuljon ki.
Tapasztalataink szerint természetesebb végeredményt érhetünk el:
- ha a csillagkicsinyítést a feldolgozás legvégső fázisában végezzük el,
- továbbá korábbi Photoshop verziók jellemzője, hogy az alábbi módszerben alkalmazott „minimál szűrő” a csillagokat rombusz alakúvá tehetik, ezért a program újabb verzióit javasoljuk használatra.
A módszer mindazonáltal a sűrű csillagmező kezelésére csak részben alkalmas.
Csillagkicsinyítés lépései
1.
Első lépésként jelöljük ki a teljes képünket, melyen csillagkicsinyítést szeretnénk végezni (továbbiakban alapréteg) és készítsünk róla egy másolatot új rétegként az alapréteg fölé.
(Ctrl+A, Ctrl+C, Ctrl+V)

2.
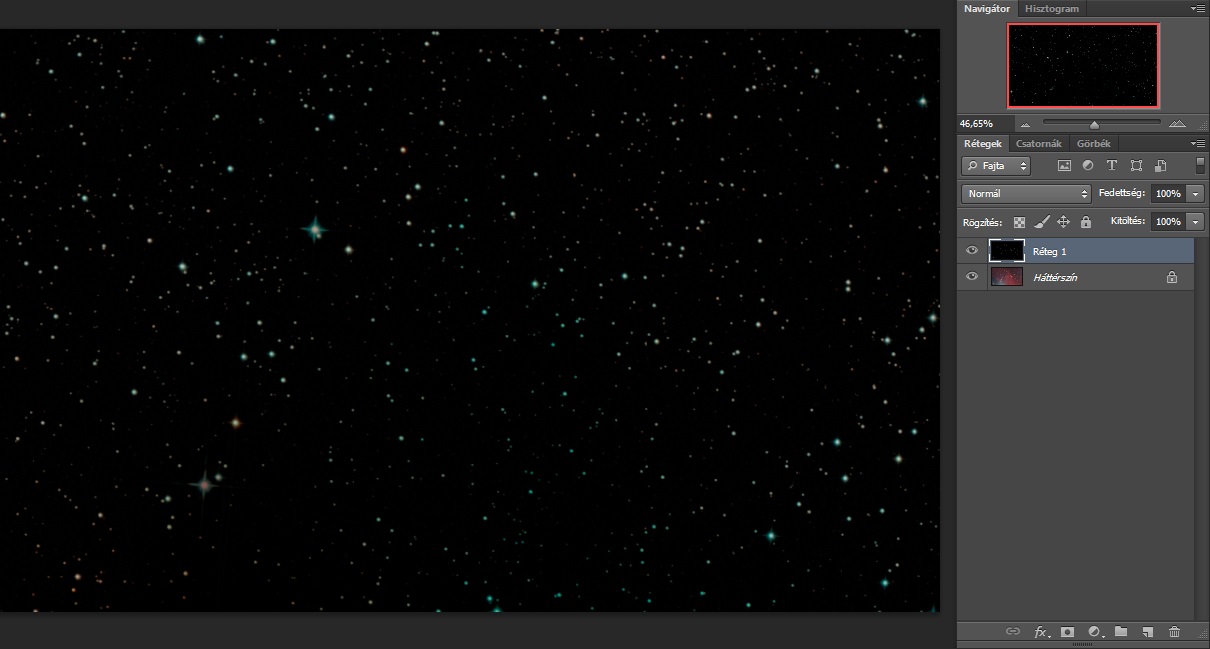
A másolt rétegen végezzünk csillagtalanítást (por és karcok szűrő segítségével több lépésben, vagy egy más, erre fejlesztett program segítségével pl.: „starnet++”), majd a csillagtalanított réteget állítsuk a lenyíló menüből ”normál”-ról „különbségre”
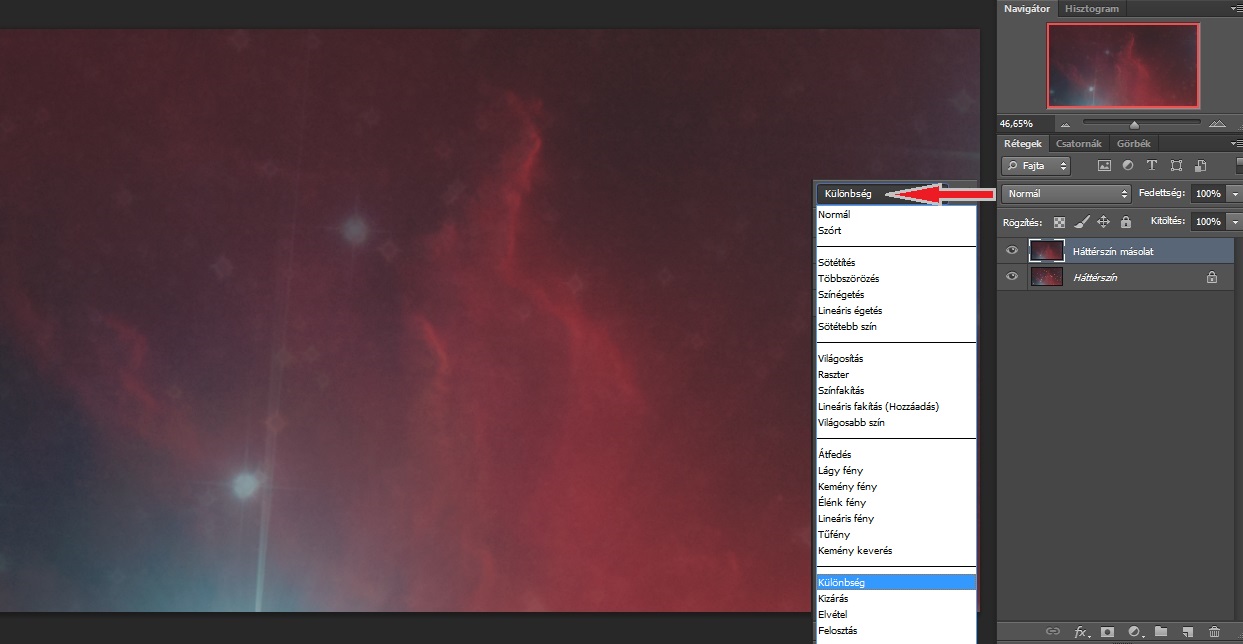
Az így kinyert csillagmezőt mentsük el egy új rétegként.
(Alt+Ctrl+Shift+E)
A csillagtalanított réteg törölhető
3.
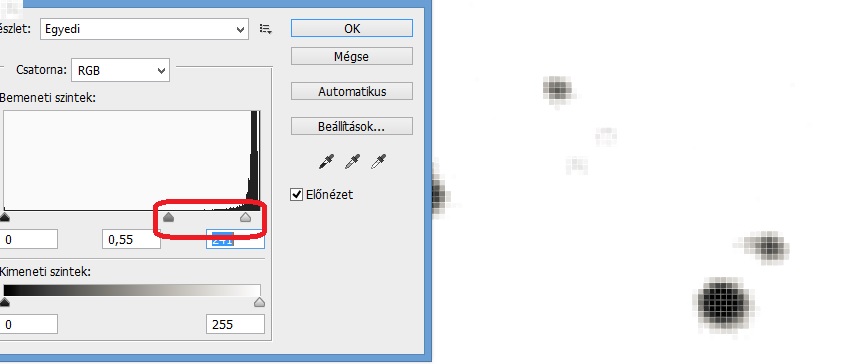
Az előző lépésben kinyert csillagmezőt állítsuk fekete-fehérre (kép>korrekciók>Fekete-fehér), majd a „Szintek” menüpontban a csúszkák segítségével próbáljuk meg a csillagokat a lehető legjobban elhatárolni a háttértől*. (Tehát a csillagok minél világosabbak legyenek, míg a háttér maradjon sötét.)
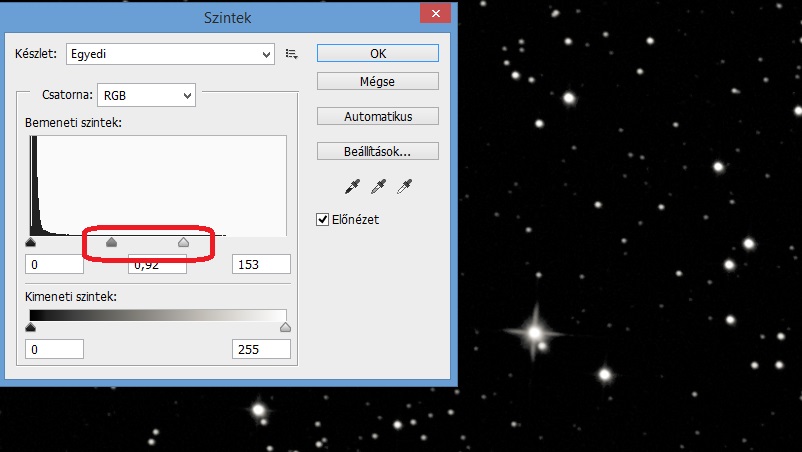
*Ennél a lépésnél különösen figyeljünk arra, hogy a csillagok méretét ne növeljük meg, csak az intenzitásukat.
(Ezt az előnézet ki-, bekapcsolásával folyamatosan ellenőrizhetjük.)
4.
Az előző lépés tovább pontosítható, ha a réteget ezután negatívba tesszük (Crtl+I) és megismételjük az eljárást, ugyanis ekkor elkülöníthetjük a jelen lévő zajt is –ha van- a halványabb csillagoktól.
előtte
utána
5.
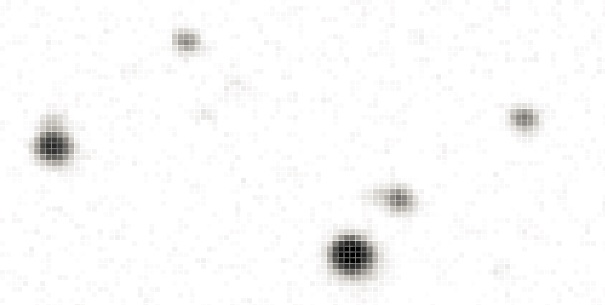
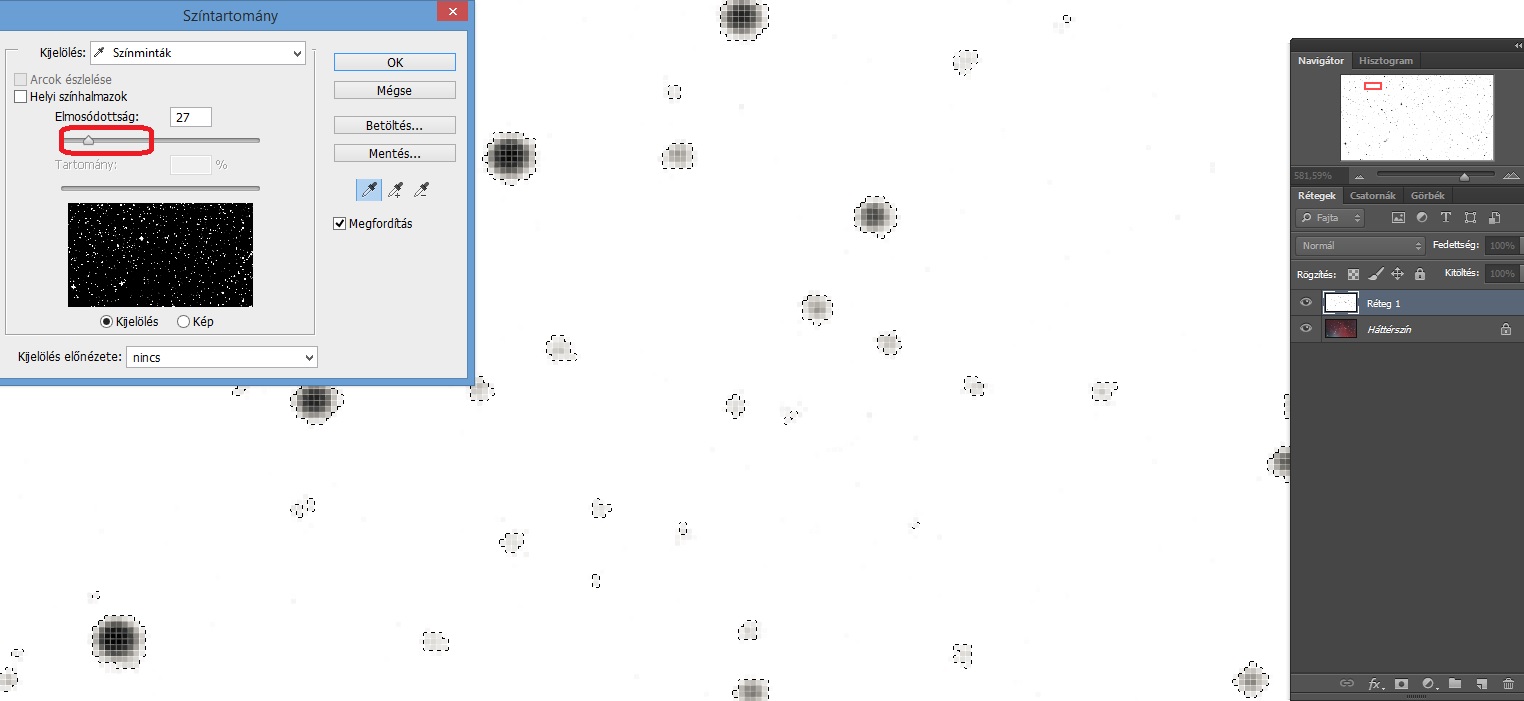
Az inverz csillagmező rétegen végezzünk színtartomány szerinti kijelölést. Az elmosódottság csúszkát állítsuk úgy, hogy segítségével a leghalványabb csillagok - szürke pixelek - is kijelölésre kerüljenek.
6.
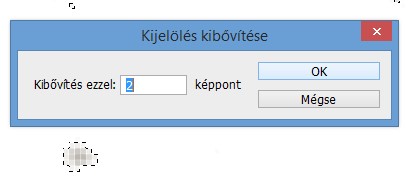
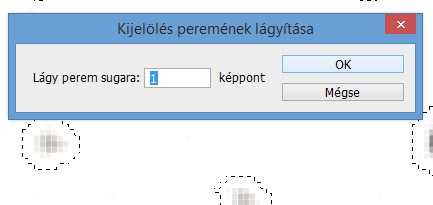
A kijelölést növeljük meg 2 pixellel (kijelölés>módosítás>kibővítés), és adjunk hozzá 1 pixel lágy peremet (kijelölés>módosítás>lágy perem).
7.
A kijelölés megtartása mellett másoljuk le az alapréteget egy új rétegként. A csillagmező rétegünket törölhetjük.

Ezután a kijelölés szélén hozzunk létre egy átmenetet „szegély finomítása” (Alt+Crtl+R) menüpontban a „lágy perem” csúszkával melyet állítsuk - képünknek megfelelően kb. - 1-2 érték közé.

[ennél a lépésnél érdemes lehet megjegyezni, hogy akár el is menthetjük a kijelölésünket (kijelölés>kijelölés mentése)]
8.
A kijelölésen alkalmazzunk 1-es értékkel minimál szűrőt. (szűrő>egyéb>minimális)
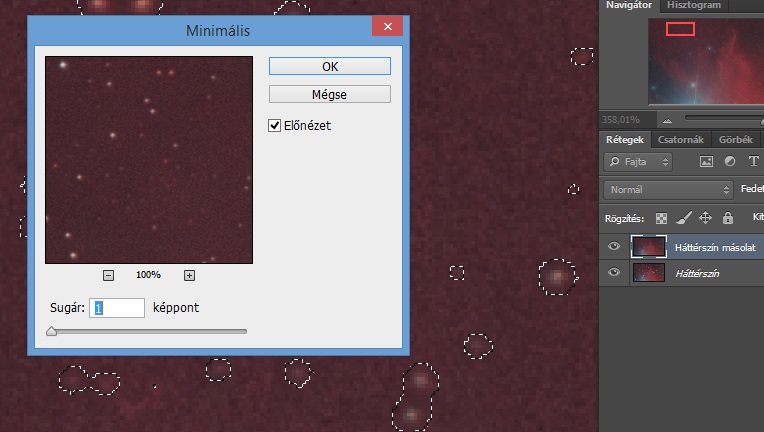
Majd másoljuk ki új rétegként a minimál szűrővel kicsinyített csillagmezőt (Crtl+C, Crtl+V), és a réteg átlátszhatóságát állítsuk ízlés szerint (ajánlott maximum 50%).

Kiss Péter - Milyen expozíciós idővel készült flat képeknek a legjobb a korrekciós hatása a kalibrált majd integrált nyers képekre?
Bevezetés
Ez a cikk azért született, hogy felhívjam a figyelmet a flat képek fontosságára, bemutassam, hogy az eltérő expozíciós idővel készült flat képek eltérően korrigálják az integrált (stackelt) képeket. Remélem, hogy az itt leírtakkal a többi asztrofotósnak ötletet adok arra, hogyan vizsgálják felül a kialakult flat készítési gyakorlatot, és hogy ezzel megkönnyítsem a képfeldolgozást, ami véső soron szebb végeredményt adhat.
Felszerelésem:
- SkyWatcher F4 200 karbon tubus
- SkyWatcher F4 kómakorrektor
- Canon 600d (átalakított)
- Saját készítésű flatbox
Mindenekelőtt leszögezném, hogy a következőkben ismertetett összehasonlításnál a saját építésű flatboxomat, és egy Canon 600d DSLR-t használtam, fontos megjegyezni, hogy a DSLR-ben van egy felcsapódó tükör és egy redőnyszerkezet a szenzor előtt melyeknek kiemelt jelentősége van a flat képek készítésénél. (Csillagászati CMOS kameráknál egyik sincs, ráadásul nincs tükörakna ami vignettációt okozna. Néhány digitális fényképezőgépben már tükör sincs pl. Canon EOS R) Ezen kívül a házilag készített flatbox minden igyekezetem ellenére, ha nem is számottevően, de valószínűleg nem biztosít 100%-ig homogén megvilágítást.
Miért kell flat képeket készíteni?
A flat képek készítése megkerülhetetlen, két okból is szükséges a nyers képeket flat képekkel kalibrálni:
- Nagyon kevés optikai rendszer (távcső + korrektor) világítja meg a teljes szenzor felületet egyenletesen, mindig számolnunk kell valamennyi peremsötétedéssel (vignettációval). Egyes esetekben azonban lehet, hogy elhanyagolhatjuk, ha pl. nagyon kis szenzormérettel dolgozunk, ekkor lehetséges, hogy az érzékelő megvilágítás egyenletes lesz.
- A távcsövünk a gondos karbantartás/tisztítás ellenére is időről időre porosodik, az optikai elemeken szennyeződések rakódnak le, melyek befolyásolják a leképezést, apró árnyékfoltok jelennek meg a nyers képeken. Ezeknek a foltoknak az egyetlen jó eltüntetési módja a flat korrekció.
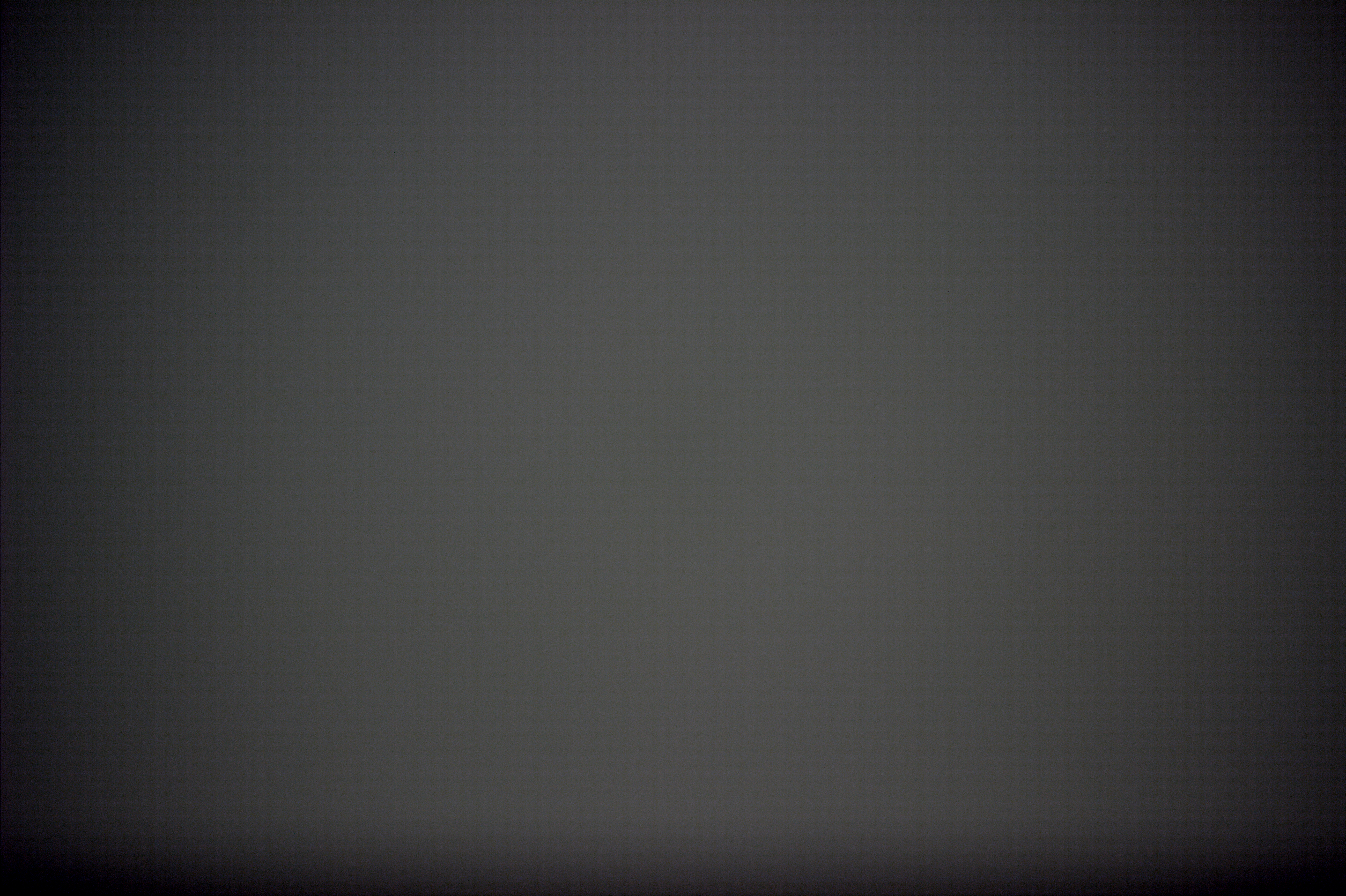
Egyenletesen megvilágított optikai rendszer leképezése peremsötétedést okoz a nyers képen.
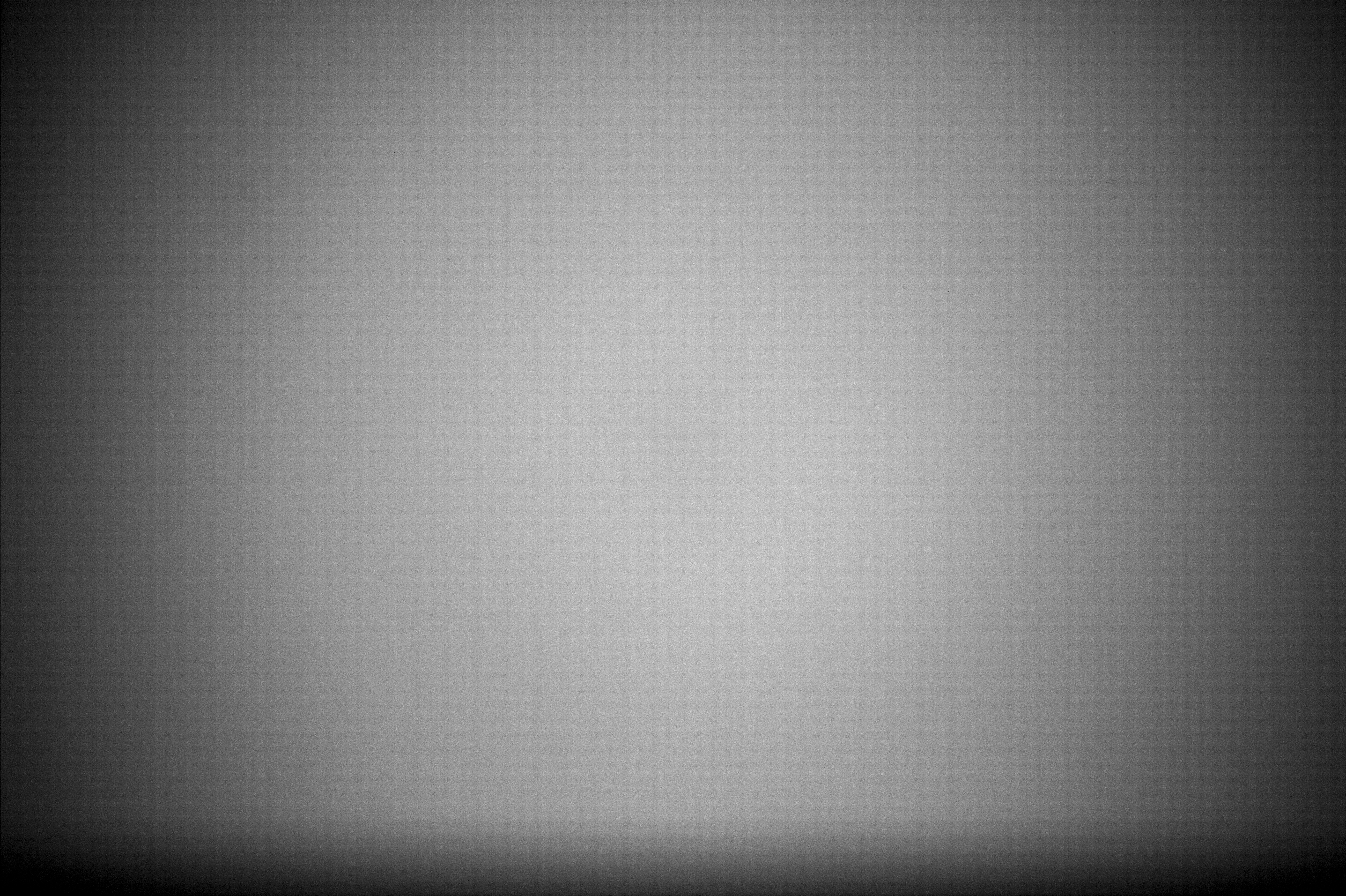
Felgörbézett flat képen létszik egy porszem árnyéka a bal felső sarok közelében.
Ha a rendszerünk nem is okoz vignettációt a második pontban leírtak miatt mindenképpen szükséges a flat képek készítése. A porszemek által megjelenő sötét foltok eltávolítása a végső képről nagyon nehézkes még a modern szoftverek segítségével is, sokkal jobb megoldás, ha ezektől már a kalibrálás során megszabadulunk.
És mivel a flat képek készítése úgy szólván kötelező, meg kell találnunk azokat a beállításokat melyek segítségével a lehető legjobb minőségű flat képeket tudjuk készíteni. Ne elégedjünk meg a legkönnyebb és leggyorsabb módszerekkel. (Pl. 1/1000-es záridővel fél perc alatt megvan 30 db flat kép.) A nem megfelelő gondossággal készített flat képek problémát okozhatnak a post-processing során. A következőkben erről lesz szó.
Mi a probléma az integrált képpel?
A képen az M94 látszik. Az integrálás után kapott képet erősen felgörbéztem, hogy jól látszódjon a probléma, de más módosítást nem végeztem rajta. (30 db kalibrált light képből, iso 800 x 5perc)

A nyersek Belecskán készültek nagyon jó ég alatt, ha volt is gradiens az nem így nézne ki. Tapasztalt asztrofotósok szerint itt bizony flat hiba van: túl rövid záridővel készülnek a flat képek (1/500)
Miért alakult ki rossz flat készítési gyakorlat?
Viszonylag sokáig tartott mire rájöttem, hogy nem megfelelő módon készítem a flat képeimet, nagyon rövid záridővel exponáltam. Ha az ok egyszerű lenne, már hamarabb rájöttem volna. Számos más tényező nehezítette a probléma felismerését:
- Budapesten kezdtem fotózni fényszennyezett égen, azokon a képeken nagyon erős a fényszennyezés hatása, nehéz a flat hibát észrevenni.
- A flat hiba itt azért szembetűnő, mert a fotózott objektum kicsi a kép teljesen méretéhez képest, a kép többi részén pedig egyenletes égi háttér van. (Alacsony a jel/zaj arány, ezért a rossz flat korrekció jobban látható.) Olyan képeken, ahol a teljes látómezőt kitölti pl. valamilyen köd, szinte észrevehetetlen.
- A flat hiba ennyire egyértelműen akkor látszik, ha szűrő nélkül készülnek a nyersek. Ha valamilyen szűrővel dolgozok (pl. IDAAS, UHC, HA) akkor a szűrő miatt hosszabb expozíciós idővel készülnek a flat képek. Mint kiderült már egészen kicsi növekedés az expozíciós időben jelentősen javítja a flat kalibrációt.
- 1 db kalibrált light képen nem látszik a flat kalibráció hibája, minél több képet átlagolunk, annál látványosabb lesz a hiba.
- A flatbox fényereje túl nagy volt és nem tudtam szabályozni. 1/500-as záridő kellett ahhoz, hogy a kép ne égjen be.
Flat kalibráció tesztelése
A fenti példaképen a Messier 94 nevű galaxis látható, ennek a témának a fotózása közben lett nyilvánvaló, hogy a valami baj van a flat készítési gyakorlatommal. Rendszerint hajnalban készítem a flat képeket, majd az egész felszerelést szétkapom és mindent elpakolok, ezáltal elvész az utólagos fltattelés lehetősége, hiszen kiveszem a korrektort a kihuzatból és elállítom a fókuszt ezáltal elveszik a pontos kamera pozíció. A tesztelést otthon végeztem, ehhez az kellett, hogy a korrektort a kihuzatban hagyjam, és gondoskodjam róla, hogy a fókusz ne mozdulhasson el. Így az utolsó nyers sorozatot tetszőleges flat beállításokkal tudtam kalibrálni.
A tesztelés menete:
- Különböző záridővel készült flat csoportok készítése. (1/500, 1/30, 2, 4, 10, 15, 20 másodperc.)
- Csoportonként 30db flat kép (iso100), tükörfelcsapás az expozíció indítása előtt, hisztogram minden esetben kb. 50%-ot ért el.
- Flat kalibrálás master bias és master flat darkok felhasználásával.
- Master flat-ek elkészítése.
- 30 db light kép kalibrálása master flat, master bias, master dark-ok segítségével. (iso 800, 5 perc.)
- Light képek demozaikolása.
- Demozaikolt képek egymáshoz igazítása a csillagmező alapján.
- Képcsoportonkénti integrálás.
A képfeldolgozás Pixinsight-ban végeztem. A light képek iso 800-on, a flat képek iso 100-on készültek. Ennek az az oka, hogy a flatbox fényereje túl magas, csak iso 100-on volt lehetséges a flat képek készítése anélkül, hogy beégtek volna. Az integrált képeket Pixinsight-ban STF autostretch (boosted) eszközzel felgörbéztem, majd Photoshop-ban alkalmaztam a kiegyenlítés funkciót, így nagyon jól látszanak a különbségek. (Ez nagyon durva kiemelése a hibáknak, és csak arra szolgál, hogy szemléltessem a különbségeket.)
Eredmények:
Animáció a kalibráció eredményével
